
パーツ仮組み

ホールセンサーとフットスイッチ用のスイッチ付きステレオジャックを除けば、
電子パーツは、ほぼ揃ったので筐体にパーツを仮組みしてみる。
その前にアルミの角棒からフォトセンサの取り付けステーを用意する。
フライスでネジ位置を読み取り加工。

ボール盤でネジ下穴を開けて、M3のタップでネジ切り。
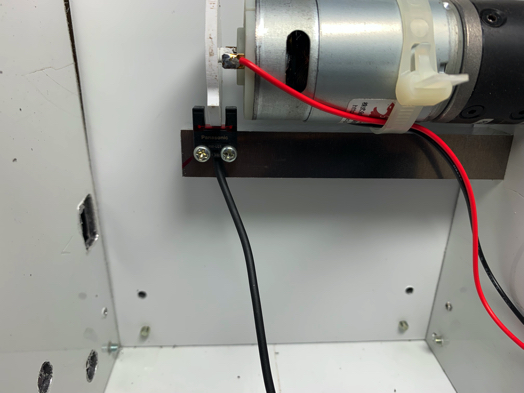
モーターとフォトセンサを取り付け、位置関係を確認。
問題ないようだ。この部分がしっかりしていないと正確な回転数の計測ができない。

正面板にポット、スイッチ、ディスプレイ、シャフトホルダーを装着。

裏面はこんな感じ。
左下がArduino Nanoの互換品だが、
少し配線し辛いので配置を変えた方がいいかもしれない。

左側板には、メインスイッチ、アダプタージャック、
2つのフットスイッチ用のジャックを配置。
フットスイッチ用ジャックは、モーターのスタート・ストップと、
回転スピードコントロールペダルを接続できるようにする。
ワインディング作業中は、ワイヤの操作で両手が塞がることもあるし、
何よりワイヤからも目が離せない。
本体のスイッチだけでなく、フットスイッチでもコントロールできれば、
ワイヤから目を離すこと無く、落ち着いて作業できる。

シャフトホルダーにワイヤガイドを取り付け。
ワイヤガイドは、もっとフレキシブルに位置・高さ調整できた方が良いかも。

パーツを組み付けるとそれらしくなる。
一旦、このパーツ配置で配線作業していく。
